Evolution On The Move
A short technical article explaining the locomotive mechanisms behind biped and quadruped gait cycles.
The Biped Gait Cycle
Bipedalism is a form of locomotion in which only two legs are used to sustain stability, as opposed to quadrupeds who use four legs and always have at least two points of contact with the ground at any given time to maintain stability. In terms of mechanics, bipedalism is very unstable, but this instability allows for flexibility and efficiency. As a result, human locomotion uses a lot less energy in comparison to quadruped locomotion. Despite the morphological differences between quadrupeds and bipeds, the gait cycle comprises of a similar mechanism in which kinetic energy is exchanged for gravitational energy and vice versa (Gan et al., 2018). This mechanism resembles an inverted pendulum model and is an example of passive dynamics working to increase energy efficiency during movement.
The gait cycle of humans is a ballistic, feed-forward movement modulated through in-step feedback. It is comprised of a stance phase, with the foot in contact with the ground, and a swing phase, with the foot not in contact with the ground. In the human, bipedalism is an unstable fall forwards which is continually caught. The momentum continues, keeping this instability moving forwards. The points of contact on the foot are the ball and heel, allowing for a ‘roll-over’ action which helps to maintain balance.
The centre of mass of humans has evolved to move along a straight line, improving the efficiency and flexibility of movements. The valgus angle, defined as the inwards angle from the hip to the knee, is the centreline of walking. Whilst this causes problems with stability, it allows for an efficient movement. The pelvis tilts and rotates during the gait cycle to keep the centre of mass stable. This is further aided by the knee to maintain the efficiency of the gait cycle (see Figure 1).
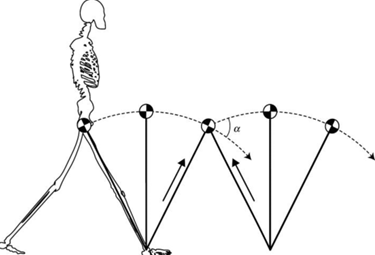
Figure 1: The maintenance of stability in the human gait cycle following the dynamics of an inverted pendulum. The trailing and leading leg redirect the trajectory of the centre of mass from a downwards arc to an upwards arc in preparation of the next step. The energetic cost of this redirection is proportional to α. Image from Matthis and Fajen (2013).
Bipedal movement occurs through the sagittal plane. At the hip, knee and ankle joints, there are a range of angles able to move the leg in different positions. Abduction is a lateral movement of a limb away from the body whereas adduction is a lateral movement bringing the limb towards the midline. The first movement in the human gait cycle is a tilt to the left when the right leg is raised. This is brought about through the action of the abductor muscles on the lateral portion of the pelvis which allows the leg to move outwards. These muscles are shorter in humans, which results in less effort in lever action and hence increased efficiency. Flexion is a movement occurring in the sagittal plane which brings a limb towards the body, such as the action of lifting the knee. Extension is a movement which takes a limb away from the body. Flexors and extensors can be found in the hip and knee to facilitate the movements required for a stable gait cycle. During the strike portion of the gait cycle, both muscles and antagonist muscles in the leg can work together and contract simultaneously to provide support. This action is known as ‘locking up’ and helps to maintain stability. Muscles are active immediately prior to and after a heel strike. This acts to straighten the leg, then support the hip as the centre of mass shifts to the supporting leg.
The iliacus and psoas muscles on the inside front of the pelvis contract to bring about the activation of walking. This is achieved through flexing the hip, bringing the knee in towards the torso. In contrast, the gluteus maximus extends the hip, swinging the leg backwards and locking up to maintain stability. The gluteus medius, minimis, and the tensor fascia lata abduct the hip, pulling the leg sideways and away from the body to control the position of the pelvis, allowing for a tilt that maintains a stable centre of mass. In the calf, three muscles work together to propel the leg forwards. These are the gastrocnemius, soleus, and plantaris muscles. Together, they are known as the Achilles tendon which is used as a spring and retains energy.
The process of walking in humans is very efficient as muscles are not active all the time. The major advantages of bipedalism and this evolved gait cycle are the low energy expenditure and a high positional flexibility achieved through these various muscles (Kroker, 1999).
The Quadruped Gait Cycle
In quadrupeds, walking is the most energy efficient gait. The cycle consists of a four-beat stride with each foot striking the ground at slightly different times. Each hindlimb alternately replaces the forelimb on the same side. During this switch, the quadruped only has two points of contact with the ground briefly. Quadrupeds therefore have a highly stable gait due to the multiple points of contact with the ground at any given time.
During walking, the left hindlimb (LH) moves forward to replace the left forelimb (LF). During this exchange, the LF anticipates the lift, leaving the quadruped supported on two legs until the LH is set. This process is repeated on the alternate side, moving the right hindlimb (RH) to replace the right forelimb (RF). By moving one side at a time, the quadruped rocks slightly left and right. This shifts their weight and centre of mass to balance on the currently steady side (Griffin et al., 2004). Given the multiple points of contact with the ground, unlike bipeds, there is no need for tilts and rotations to maintain a stable centre of mass. The alternate movements of the legs act to stabilise the gravitational energy and kinetic energy (see Figure 2).
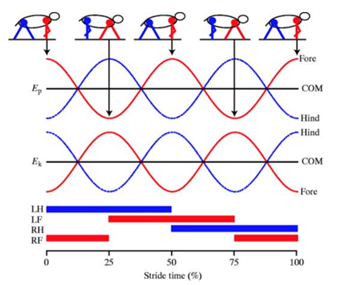
Figure 2: The gait cycle of quadrupeds. The footfall order is left hindlimb (LH), left forelimb (LF), right hindlimb (RH), and right forelimb (RF). The inverted pendulum action of the fore quarters and hind quarters acts to stabilise the gravitational energy (Ep) and kinetic energy (Ek). This keeps the centre of mass (COM) stable. Image from Griffin et al. (2004).
Summary
In conclusion, the gait cycles of bipeds and quadrupeds vary greatly but show conserved mechanisms of an inverted pendulum. The rocking motion allows for the maintenance of a stable centre of mass. Whilst humans have tilt and rotation mechanisms in place due to the action of the pelvis and knee to maintain stability, quadrupeds maintain stability through a four-beat stride with multiple points of contact with the ground. These anatomically variant gait cycles are therefore able to achieve optimal energy efficiency and stability.
References
Gan, Z., Jiao, Z. and Remy, C.D. (2018). On the Dynamic Similarity Between Bipeds and Quadrupeds: A Case Study on Bounding. IEEE Robotics and Automation Letters, 3(4), pp.3614–3621. doi:https://doi.org/10.1109/lra.2018.2854923.
Griffin, T.M., Main, R.P. and Farley, C.T. (2004). Biomechanics of quadrupedal walking: how do four-legged animals achieve inverted pendulum-like movements? Journal of Experimental Biology, 207(20), pp.3545–3558. doi:https://doi.org/10.1242/jeb.01177.
Kroker, P. (1999). The problem of remaining upright. The BMJ, 319(7220), pp.1300–1300. doi:https://doi.org/10.1136/bmj.319.7220.1300.
Matthis, J.S. and Fajen, B.R. (2013). Humans exploit the biomechanics of bipedal gait during visually guided walking over complex terrain. Proceedings of the Royal Society B: Biological Sciences, 280(1762), p.20130700. doi:https://doi.org/10.1098/rspb.2013.0700.